Matt Johnson
Systems Engineering II
Ms. Green & Mr. Cuttrell
17 January 2011
STEMM REPORT
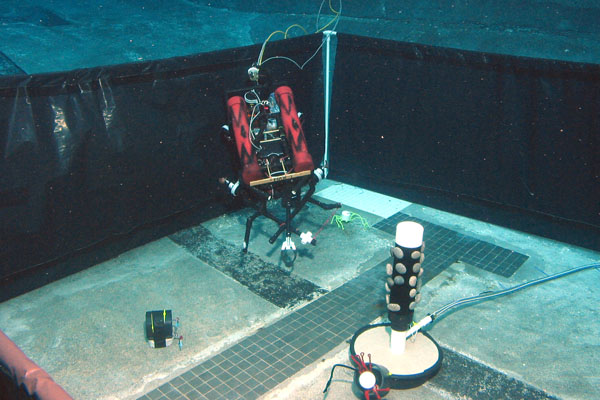
-The Capstone Design Project focuses on the main aspect of systems engineering- identifying a problem and then solving it. As part of the Capstone Design Project, I am designing and constructing a remotely operated vehicle with the aid of two team members. I am the mechanical engineer as I work alongside a structural and electrical engineer. The final solution is a remotely operated vehicle that will compete in the MATE ROV competition. The competition simulates a real-life remotely operated vehicle expedition off the coast of
Hawaii. The MATE competition will be held in a chlorinated pool at Monmouth University. Maneuvering depths up to 4 meters, the final remotely operated vehicle will complete tasks specified by the competition. The tasks include collecting samples of a new crustacean species, sampling a vent site, taking temperatures at various locations in the pool, listening to sounds with a hydrophone, and resurrecting a PVC structure. The final solution is powered by a single 12 volt, 25 amp battery and is controlled by one team engineer from a control shack. -As the mechanical engineer, I am designing and constructing a mechanical claw to be mounted on the hull of the remotely operated vehicle (see figure 1). The mechanical claw is used to complete specific tasks of the MATE competition, such as sampling a crustacean species and collecting a sample of agar. The final solution has a gear cage to power all functions of the mechanical claw. Inside of the gear cage, an 800 rpm electric motor powers the claw in both directions. A series of idler gears operates both sides of the 3” diameter PVC claw simultaneously.
ENGINEERING-
-The final mechanical claw solution is an innovation. The idea of a mechanical claw has existed for over a century. Other versions of the mechanical claw are used in various types of underwater vehicles, spacecrafts, and video games. The final claw solution is an adaptation of existing mechanical claws to best complete the tasks of the MATE competition. The final solution is innovated to fit on a smaller hull structure, operate within the parameters of the underwater pool environment, and run on a single 12 volt, 25 amp battery. It is a component of a closed system. The mechanical claw is a part of a final ROV solution that does not transfer mass between itself and its surroundings. However, the final ROV utilizes the mechanical claw component to move and lift objects in the chlorinated pool, outside of its hull structure.
-The type of engineering involved in the final solution of the mechanical claw is mechanical engineering. Mechanical engineering applies the principles of physics and material science for the design and manufacturing of the mechanical system. The final solution uses a series of gears to slow down the rpm’s of the PVC claw (see figure 2). The gear sizes progress from 10 teeth gears to 60 teeth gears, which ultimately power the claw component of the system in both horizontal directions.
MANUFACTURING-
-The type of manufacturing involved with the final design is flexible manufacturing. For many of the students taking part in the MATE ROV competition, it is their first time designing and constructing a product that will solve the problems the competition will impose. The Capstone Design Project is an educational experience, making it more likely that mistakes will be made. The purpose behind flexible manufacturing is to use materials and concepts that have the ability to adapt to unpredicted changes in the final design. The plastic gears, aluminum sheet metal, and 3” PVC piping are all mass produced materials that are gathered and constructed together to make the final mechanical claw. The type of manufacturing involved with the materials selection of the final design is metalworking, plastic, and electronic manufacturing. Metalworking and plastic manufacturing are used to make aluminum sheet metal and PVC piping available to be utilized on the ROV. Electronic manufacturing is not only involved with operating the mechanical claw, but it is also used to power all the functions on the structure of the remotely operated vehicle.
SCIENTIFIC CONCEPTS-
-A major scientific concept that applies to the mechanical claw of the final design is gearing. They have been traced all the way back to the ancient Greeks, around 50 A.D.
Gears work in tandem to change the speed and direction of a power source. Rotating teeth mesh together on a series of gears to create torque, or force that pushes or pulls an object. A small size gear (10 teeth) can interlock with a much larger gear (30 teeth) to create a mechanical advantage (Figure 3). The 10 tooth gear may be rotating at a faster rate, however, the 60 tooth gear will spin at a slower rate, while creating a sufficient amount of torque for the object it happens to be powering. On the other hand, gears can be utilized to speed up a power source by gearing up from a large gear to a smaller gear (Figure 4). Gears are a common component of systems because they can operate things much larger.
TECHNOLOGY-
-The technology involved with the final design of the mechanical claw is electric motors and gears. Electric motors (Figure 5) use electrical energy to create mechanical energy. The energy it transmits powers the first gear in the series of the final mechanical claw. The electric motor spins at about 800 revolutions per minute and uses a worm gear to rotate the first 30 tooth gear in the final solution. Gears are a scientific principle because they use force and torque to operate objects, but they are also a form of technology. Gears are considered simple machines because for the amount of distance covered by the rotating gears, they create a much greater output. They are used to operate large machinery in today’s world.
MATHEMATICAL CONCEPTS-
-A mechanical advantage will be created when using a series of gears to operate a mechanism. A mechanical advantage (Figure 6) multiplies the torque that the mechanical claw will exert. By utilizing the gears correctly in the final solution, small plastic gears are able to create a greater amount of torque to open and close the claw with sufficient force. A gear ratio is a mathematical concept that applies to the gear system inside of the gear cage. It is also concerned with the speed at which the claw ultimately opens and closes. The formula to calculate the gear ratio is as follows: number of teeth on the driver gear divided by the number of teeth on the gear that is being driven. Idler gears are a type of a gear series chained together between the first and last gear. Its purpose is to change the direction of the final gears. Therefore, it does not affect the gear ratio of the final mechanical claw solution. In the final solution, an 800 rpm motor will rotate a 30 tooth gear. The chain of 10 teeth idler gears will not change the gear ratio between the 30 tooth gear and the final 60 tooth gears. The final solution will rotate each claw simultaneously at 2 teeth per second.
CONCLUSION-
-The final design for the MATE ROV competition is an innovation of a mechanical claw. The final claw is adapted to a smaller scale hull and environment to best meet the tasks of the event. Flexible manufacturing is prominent in the design of the final solution, while mass production is heavily involved in the selection of the materials. The final design is powered by a series of gears inside of a cube shaped aluminum gear cage. The PVC claw will be attached to the gear cage, which will be mounted on the floor of the hull. The scientific and mathematical concept of gearing, along will the relationship between the gears, or gear ratio, was strongly taken into account when designing the final mechanical claw. The gearing system creates a mechanical advantage and torque to best operate the claw in both horizontal directions. The MATE remotely operated vehicle competition will require the structure, propulsion system, and claw mechanism to operate efficiently, as one system to complete the tasks the competition imposes.